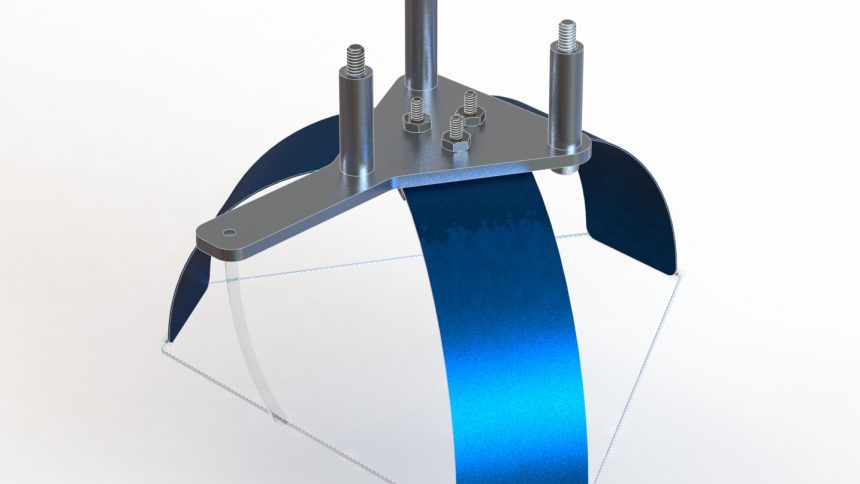
Designed a gripper to firmly grasp a 3 inch sphere even under large dynamic loads. Mass minimized to ~75g. Project for 24-370.
Roboticist and Mechanical Engineer
Designed a gripper to firmly grasp a 3 inch sphere even under large dynamic loads. Mass minimized to ~75g. Project for 24-370.