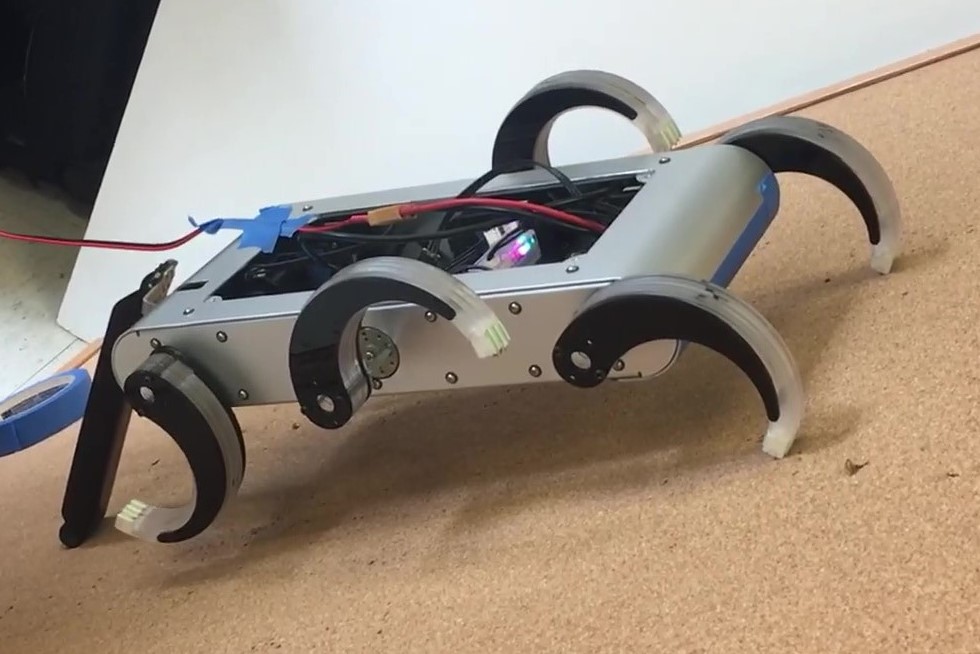
This work started as a semester long project for Prof. Aaron Johnson’s Robot Design and Experimentation class at CMU. Many of the team members have worked in the Robomechanics Lab with X-RHex, a simple but rugged robot that can traverse almost any rough terrain. However, X-RHex is stymied by steep slopes and vertical walls, so our team decided to improve it’s climbing ability by adding microspine feet and designing a lighter body. We named this new climbing platform T-RHex.
For more information, read the prepublished paper on arXiv, which I coauthored with Catherine Pavlov, Adam Zeloof, and Vivaan Bahl. We have generated some media buzz with our polished design and interesting results, see our media features on IEEE Spectrum, Electronic Daily News, Digital Trends, Hackaday, Robotic Gizmos, CNET, or TechXplore.
Finally, check out the video we put together explaining the key ideas and results of our work.