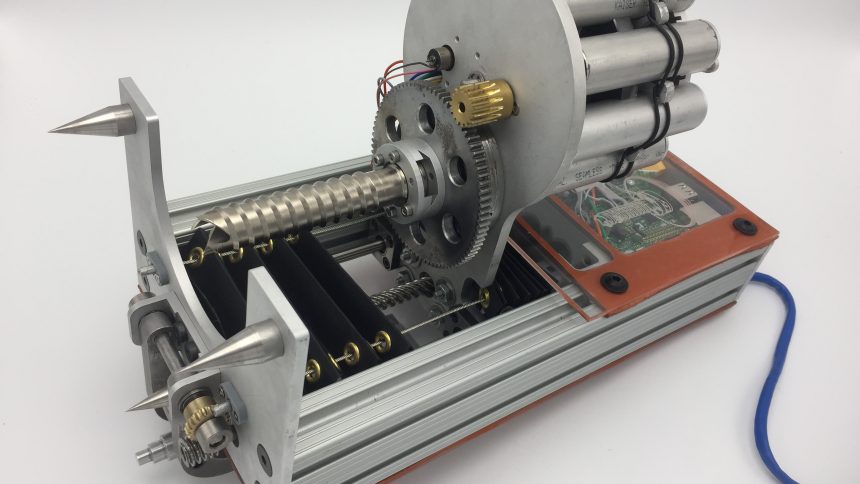
Electromechanical design, iteration, and deployment of the Ice Screw End Effector version 2.0 (ISEEv2.0), which is designed to be attached to a climbing robot such as JPL’s LEMUR or RoboSimian. Successfully deployed on Mt. Rainier for ice core sampling and scientific study.