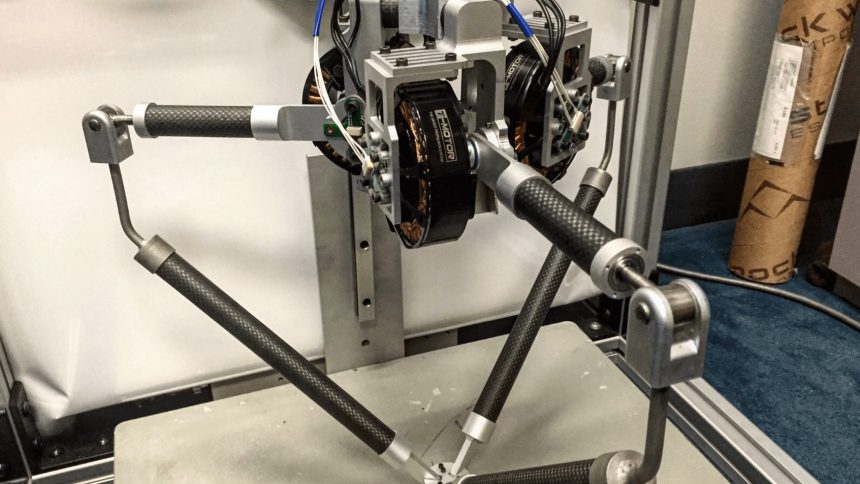
Redesign, testing, and optimization of the GOAT leg (Gearless, Omni-directional, Acceleration-vectoring Topology), a delta-arm inspired leg for agile robot locomotion.
Roboticist and Mechanical Engineer
Redesign, testing, and optimization of the GOAT leg (Gearless, Omni-directional, Acceleration-vectoring Topology), a delta-arm inspired leg for agile robot locomotion.