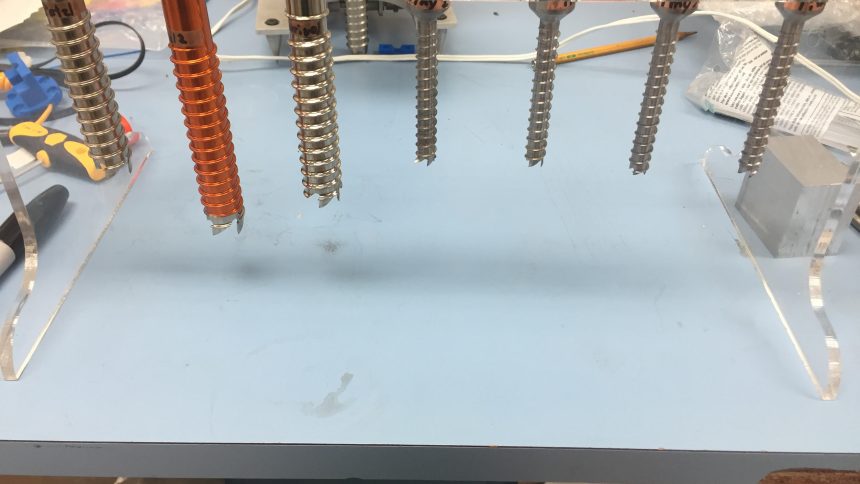
Prototyping, design, and preliminary testing to determine the best mechanism for anchoring a climbing robot into cryoice (water-ice at -200C). Attempted conventional drill anchor, ice-screw anchor, and sublimation anchor designs. This project was conducted at JPL as an extension of the Ice Screw End-Effector project in the summer of 2018.